- Apa itu Line Follower Robot?
Pengertian Robot
Kata robot yang, berasal dari bahasa Czech, robota, yang berarti pekerja, mulai menjadi populer ketika seorang penulis berbangsa Czech (Ceko), Karl Capek, membuat pertunjukan dari lakon komedi yang ditulisnya pada tahun 1921 yang berjudul RUR(Rossum’s Universal Robot) [1]. Robot dapat diartikan sebagai sebuah mesin yang dapat bekerja secara terus menerus baik secara otomatis maupun terkendali. Robot digunakan untuk membantu tugas-tugas manusia mengerjakan hal yang kadang sulit atau tidak bisa dilakukan manusia secara langsung. Misalnya untuk menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Pada dasarnya dilihat dari struktur dan fungsi fisiknya (pendekatan visual) robot terdiri dari dua bagian, yaitu non-mobile robot dan mobile robot. Kombinasi keduanya menghasilkan kelompok konvensional (mobile dan non-mobile)contohnya mobile manipulator, walking robot,dll dan non-konvensional (humanoid, animaloid, extraordinary). Saat ini robot selain untuk membantu pekerjaan manusia juga digunakan sebagai hiburan.
Pengertian Line Follower Robot (LFR)
Line Follower Robot (Robot Pengikut Garis) adalah robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracer Robot dan sebagainya. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih atau sebaliknya, ada juga lintasan dengan warna lain dengan permukaan yang kontras dengan warna garisnya. Ada juga garis yang tak terlihat yang digunakan sebagai lintasan robot, misalnya medan magnet.

Bagaimana bisa mengikuti garis
Seperti layaknya manusia, bagaimana manusia dapat berjalan pada mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada manusia.
Sensor garis ini mendeteksi adanya garis atau tidak pada permukaan lintasan robot tersebut, dan informasi yang diterima sensor garis kemudian diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Pada konstruksi yang sederhana, robot line follower memiliki dua sensor garis (A-Kiri dan B-Kanan), yang terhubung ke dua motor (kanan dan kiri) secara bersilang melalui sebuah prosesor/driver (lihat gambar). Sensor garis A (Kiri) mengendalikan motor kanan, sedangkan sensor garis B (kanan) mengendalikan motor kiri.

- Ketika sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
- Begitu sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan mati, maka robot akan berbelok ke kanan.
- Jika kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan bergerak maju.

2. Mari Merangkai Rangkaian Elektroniknya
Untuk menrangkai rangkaian elektroniknya kita perlu tahu dulu diagram blok sistem yang akan kita bangun, dengan demikian akan menjadi mudah mengerjakannya. Blok sistem yang akan kita bagun paling tidak tampak seperti gambar berikut. Sistemnya terdiri dari sensor garis, rangkaian komparator, minimum sistem ATMega8 dan Driver motor.

Sensor garis
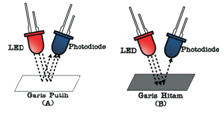
Apa itu sensor garis? Yang dimaksud sensor garis disini adalah suatu perangkat/alat yang digunakan untuk mendeteksi adanya sebuah garis atau tidak. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih. Alat ini menggunakan teknik pantulan cahaya inframerah yang ditangkap oleh photodiode dari sebuah LED merah.

Rangkaian Komparator

Rangkaian komparator berfungsi sebagai signal conditioning, artinya bahwa sinyal atau tegangan yang dihasilkan oleh sensor garis akan dikondisikan ke level yang sesuai yang sesuai yang dapat diterima oleh mikrokontroler sebagai logika”0″dan”1″atau sekitar 0-3V(logika”0″) dan 3-5V (logika”1″).
Komparator sesuai namanya berfungsi untuk membandingkan 2 input tegangan pada opamp dan akan menghasilkan output berupa tegangan logika 0 dan 5V. Dua tegangan tersebut kita ambil yang pertama dari keluaran rangkaian sensor garis, dan sebagai pembanding sekaligus tegangan referensinya kita hasilkan melalui potensiometer yang dihubungkan keVcc.
Minimum Sistem ATMega8
 Rangkaian ini berfungsi sebagai pemroses sinyal dari sensor dan menghasilkan sinyal kontrol ke rangkaian driver motor.Rangkaiannya terdiri dari mikrokontrolerATMega8,dan komponen lain sebagai pendukung agar mikrokontroler dapat bekerja (secara hardware). Rangkaian pendukung tersebut antara lain, rangkaian reset, clock, dan ISP plug untuk memprogram IC. Semuanya terangkai menjadi satu yang disebut sebagai rangkaianminimumsystemATMega8.
Rangkaian ini berfungsi sebagai pemroses sinyal dari sensor dan menghasilkan sinyal kontrol ke rangkaian driver motor.Rangkaiannya terdiri dari mikrokontrolerATMega8,dan komponen lain sebagai pendukung agar mikrokontroler dapat bekerja (secara hardware). Rangkaian pendukung tersebut antara lain, rangkaian reset, clock, dan ISP plug untuk memprogram IC. Semuanya terangkai menjadi satu yang disebut sebagai rangkaianminimumsystemATMega8.
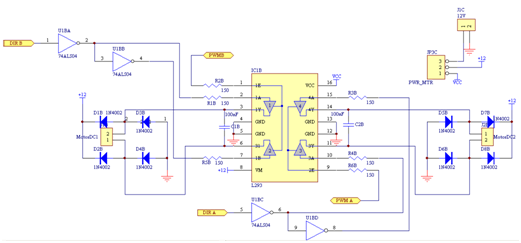
Driver Motor
Driver motor yang kita bangun menggunakan konfigurasi jembatan H (H-Bridge),yang akan mengendalikan motor ke dua arah, searah jarumjam dan berlawanan arah jarumjam.Secara konsep rangkaian ini terdiri dari 4 saklar yang tersusun sedemikian rupasehingga memungkinkan motor dapat teraliri arus dengan arah yang berkebalikan. Seperti yang dijelaskan pada bab sebelumnya,pemberian polaritas tegangan pada terminal motor akan mempengaruhi arah arus yang melewati motor,dengan demikian motor akan berputar sesuai dengan arah arusnya.
Untuk lebih cepat dan mudah anda bisa gunakan kit ROBOARD8 V1.0.
3. Mari Merangkai Mekanik Robot
Mekanik/badan robot yang akan kita buat akan tampak seperti gambar dibawah ini. Bahan yang digunakan cukup mudah didapat di toko bangunan dekat rumah kita. Prosesnyapun tidak sesulit yang dibayangkan.

- Apa itu Line Follower Robot?
Pengertian Robot
Kata robot yang, berasal dari bahasa Czech, robota, yang berarti pekerja, mulai menjadi populer ketika seorang penulis berbangsa Czech (Ceko), Karl Capek, membuat pertunjukan dari lakon komedi yang ditulisnya pada tahun 1921 yang berjudul RUR(Rossum’s Universal Robot) [1]. Robot dapat diartikan sebagai sebuah mesin yang dapat bekerja secara terus menerus baik secara otomatis maupun terkendali. Robot digunakan untuk membantu tugas-tugas manusia mengerjakan hal yang kadang sulit atau tidak bisa dilakukan manusia secara langsung. Misalnya untuk menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Pada dasarnya dilihat dari struktur dan fungsi fisiknya (pendekatan visual) robot terdiri dari dua bagian, yaitu non-mobile robot dan mobile robot. Kombinasi keduanya menghasilkan kelompok konvensional (mobile dan non-mobile)contohnya mobile manipulator, walking robot,dll dan non-konvensional (humanoid, animaloid, extraordinary). Saat ini robot selain untuk membantu pekerjaan manusia juga digunakan sebagai hiburan.
Pengertian Line Follower Robot (LFR)
Line Follower Robot (Robot Pengikut Garis) adalah robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracer Robot dan sebagainya. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih atau sebaliknya, ada juga lintasan dengan warna lain dengan permukaan yang kontras dengan warna garisnya. Ada juga garis yang tak terlihat yang digunakan sebagai lintasan robot, misalnya medan magnet.
Bagaimana bisa mengikuti garis
Seperti layaknya manusia, bagaimana manusia dapat berjalan pada mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada manusia.
Sensor garis ini mendeteksi adanya garis atau tidak pada permukaan lintasan robot tersebut, dan informasi yang diterima sensor garis kemudian diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Pada konstruksi yang sederhana, robot line follower memiliki dua sensor garis (A-Kiri dan B-Kanan), yang terhubung ke dua motor (kanan dan kiri) secara bersilang melalui sebuah prosesor/driver (lihat gambar). Sensor garis A (Kiri) mengendalikan motor kanan, sedangkan sensor garis B (kanan) mengendalikan motor kiri.
- Ketika sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
- Begitu sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan mati, maka robot akan berbelok ke kanan.
- Jika kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan bergerak maju.
2. Mari Merangkai Rangkaian Elektroniknya
Untuk menrangkai rangkaian elektroniknya kita perlu tahu dulu diagram blok sistem yang akan kita bangun, dengan demikian akan menjadi mudah mengerjakannya. Blok sistem yang akan kita bagun paling tidak tampak seperti gambar berikut. Sistemnya terdiri dari sensor garis, rangkaian komparator, minimum sistem ATMega8 dan Driver motor.
Sensor garis
Apa itu sensor garis? Yang dimaksud sensor garis disini adalah suatu perangkat/alat yang digunakan untuk mendeteksi adanya sebuah garis atau tidak. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih. Alat ini menggunakan teknik pantulan cahaya inframerah yang ditangkap oleh photodiode dari sebuah LED merah.
Rangkaian Komparator
Rangkaian komparator berfungsi sebagai signal conditioning, artinya bahwa sinyal atau tegangan yang dihasilkan oleh sensor garis akan dikondisikan ke level yang sesuai yang sesuai yang dapat diterima oleh mikrokontroler sebagai logika”0″dan”1″atau sekitar 0-3V(logika”0″) dan 3-5V (logika”1″).
Komparator sesuai namanya berfungsi untuk membandingkan 2 input tegangan pada opamp dan akan menghasilkan output berupa tegangan logika 0 dan 5V. Dua tegangan tersebut kita ambil yang pertama dari keluaran rangkaian sensor garis, dan sebagai pembanding sekaligus tegangan referensinya kita hasilkan melalui potensiometer yang dihubungkan keVcc.
Minimum Sistem ATMega8
Rangkaian ini berfungsi sebagai pemroses sinyal dari sensor dan menghasilkan sinyal kontrol ke rangkaian driver motor.Rangkaiannya terdiri dari mikrokontrolerATMega8,dan komponen lain sebagai pendukung agar mikrokontroler dapat bekerja (secara hardware). Rangkaian pendukung tersebut antara lain, rangkaian reset, clock, dan ISP plug untuk memprogram IC. Semuanya terangkai menjadi satu yang disebut sebagai rangkaianminimumsystemATMega8.
Driver Motor
Driver motor yang kita bangun menggunakan konfigurasi jembatan H (H-Bridge),yang akan mengendalikan motor ke dua arah, searah jarumjam dan berlawanan arah jarumjam.Secara konsep rangkaian ini terdiri dari 4 saklar yang tersusun sedemikian rupasehingga memungkinkan motor dapat teraliri arus dengan arah yang berkebalikan. Seperti yang dijelaskan pada bab sebelumnya,pemberian polaritas tegangan pada terminal motor akan mempengaruhi arah arus yang melewati motor,dengan demikian motor akan berputar sesuai dengan arah arusnya.
Untuk lebih cepat dan mudah anda bisa gunakan kit ROBOARD8 V1.0.
3. Mari Merangkai Mekanik Robot
Mekanik/badan robot yang akan kita buat akan tampak seperti gambar dibawah ini. Bahan yang digunakan cukup mudah didapat di toko bangunan dekat rumah kita. Prosesnyapun tidak sesulit yang dibayangkan.
Board (papan) ini digunakan untuk latihan membuat robot bagi pemula. Sistemnya terdiri dari mikrokontroler ATMega8 sebagai prosesornya, kemudian dilengkapi dengan 4 kanal analog komparator yang bisa digunakan sebagai proximity atau sensor garis. Driver motor DC menggunakan chip L293 dengan sistem H-Bridge dan dual direction control juga tersedia pada board ini. Board ini cocok bagi teman-teman yang ingin memulai petualangannya membuat robot sederhana, line tracker misalnya. Berikut skema rangkaiannya. Selamat berkarya!

Gambar 1. Komparator
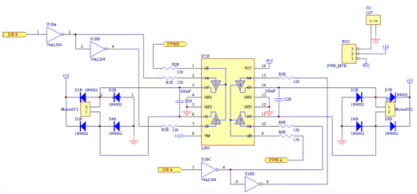
Gambar 2. Driver motor

Gambar 3. CPU


Gambar 4. Layout PCB
H-Bridge Motor Driver
Posted by may on juni , 30 2010
Driver motor yang kita bangun menggunakan konfigurasi jembatan H (H-Bridge),yang akan mengendalikan motor ke dua arah, searah jarumjam dan berlawanan arah jarumjam. Secara konsep rangkaian ini terdiri dari 4 saklar yang tersusun sedemikian rupa sehingga memungkinkan motor dapat teraliri arus dengan arah yang berkebalikan. Seperti yang dijelaskan pada bab sebelumnya, pemberian polaritas tegangan pada terminal motor akan mempengaruhi arah arus yang melewati motor,dengan demikian motor akan berputar sesuai dengan arah arusnya. Pada rangkaian driver motor ini, saklar-saklar tersebut digantikan oleh transistor yang dikerjakan pada daerah saturasi dan cut-off (Switch).
Motor DC
 Motor merupakan komponen yang mengubah energi listrik menjadi energi mekanik, dalam kasus perancangan robot,umumnya digunakan motorDC,karena jenis motor ini lebih mudah untuk dikendalikan. Kecepatan yang dihasilkan oleh motor DC berbanding lurus dengan potensial yang diberikan.
Motor merupakan komponen yang mengubah energi listrik menjadi energi mekanik, dalam kasus perancangan robot,umumnya digunakan motorDC,karena jenis motor ini lebih mudah untuk dikendalikan. Kecepatan yang dihasilkan oleh motor DC berbanding lurus dengan potensial yang diberikan.


Bagaimana cara mengatur arah putar motor DC?
Untuk mengatur arah putar motor DC cara yang paling mudah adalah membalik polaritas tegangan yang kita berikan pada terminal motor tersebut.

Bagaimana H-Bridge bekerja?
- Ketika S1 dan S4 tertutup (diagonal) dan lainnya terbuka maka arus akan mengalur dari batery ke kutub positif motor kemudian keluar ke kutub negatif motor,makamotor akan berputar kearah kanan.
- Ketika S2 dan S3 tertutup (diagonal) dan lainnya terbuka,maka arus akan mengalir sebaliknya,motor juga akan berputar kearah sebaliknya.
- Jika semua saklar tertutup, maka motor akan berhenti, dan jika ini diteruskan maka akan menyebabkan rangkaian menjadi”short circuit“.

Rangkaian H-Bridge Dengan pengatur kecepatan menggunakan PWM.

Membuat Robot Line Follower Sederhana
Posted by: Giri Kuncoro on: January 9, 2009
Robot Line Follower
hmm..apakah di antara pembaca ada yang mengerti apa itu “robot line follower”? karena banyaknya request tutorial membuat robot pada postingan saya sebelumnya, sekarang akan saya tunjukkan salah satu contoh pembuatan robot, yaitu robot line follower.. enjoy.. ![]()
INDEX : (Gara2 pagenya udah agak panjang, jadi saya buat aja index ini,masih belum lengkap nanti saya update ![]() )
)
- Pendahuluan
- Sensor (Rangkaian Photo Dioda)
- Sensor (Cara Kerja)
- Processor (Pendahuluan) – update : 11 Januari 2009
- Processor (IC LM339) – update : 11 Januari 2009
- Processor (IC 74LS00) – update : 13 Januari 2009
- Processor (Motor) – update : 13 Januari 2009
- Processor (Transistor) – update : 27 Januari 2009
- Mekanik – update : 27 Januari 2009
- PCB Layout – update : 27 Januari 2009
Secara sederhana, robot line follower adalah robot yang dapat bergerak mengikuti garis secara OTOMATIS! Sebenarnya, kalau pembaca googling, banyak sekali tutorial membuat robot line follower di internet, tapi hampir semuanya ribet dan menggunakan mikrokontroler yang belum dimengerti oleh bocah” smp dan sma yang banyak comment di postingan saya sebelumnya. Hehe.. ![]() Di bawah ini contoh robot line follower.
Di bawah ini contoh robot line follower.
 Nah..terlihat bukan di gambar ada sebuah ‘benda’ dengan roda yang dapat bergerak mengikuti garis / jalur berwarna hitam yang berbelok-belok. ‘Benda’ tersebut mengikuti garis dengan otomatis loh. Prinsip dasarnya, sama seperti manusia, mata digunakan untuk melihat, kaki/roda digunakan untuk berjalan, dan otak digunakan untuk berpikir. 3 Komponen utama pada setiap robot : mata, kaki, dan otak. Sama seperti penjelasan saya pada postingan sebelumnya, jangan pikirkan robot itu RIBET, pikirkan robot itu sederhana, jangan dulu mikir yang rumit-rumit, robot line follower yang sekarang akan saya tunjukkan adalah sesuatu yang SEDERHANA..! tanamkan kata” sederhana pada pikiran pembaca sebelum memulai.
Nah..terlihat bukan di gambar ada sebuah ‘benda’ dengan roda yang dapat bergerak mengikuti garis / jalur berwarna hitam yang berbelok-belok. ‘Benda’ tersebut mengikuti garis dengan otomatis loh. Prinsip dasarnya, sama seperti manusia, mata digunakan untuk melihat, kaki/roda digunakan untuk berjalan, dan otak digunakan untuk berpikir. 3 Komponen utama pada setiap robot : mata, kaki, dan otak. Sama seperti penjelasan saya pada postingan sebelumnya, jangan pikirkan robot itu RIBET, pikirkan robot itu sederhana, jangan dulu mikir yang rumit-rumit, robot line follower yang sekarang akan saya tunjukkan adalah sesuatu yang SEDERHANA..! tanamkan kata” sederhana pada pikiran pembaca sebelum memulai. ![]()
Okeh..satu gambar lagi sebelum kita memulai tutorialnya.. ![]() Gambar di bawah ini adalah salah satu contoh track yang digunakan untuk lomba Line Follower Robot. Track yang cukup unik bukan? Sekarang udah kebayang kan robot yang mau dibuat seperti apa?
Gambar di bawah ini adalah salah satu contoh track yang digunakan untuk lomba Line Follower Robot. Track yang cukup unik bukan? Sekarang udah kebayang kan robot yang mau dibuat seperti apa?

2. Sensor (Rangkaian Photo Dioda)
Sensor dapat dianalogikan sebagai ‘mata’ dari sebuah robot. Mata di sini digunakan untuk ‘membaca’ garis hitam dari track robot. Kapan dia akan berbelok ke kanan, kapan dia berbelok ke kiri. Semua berawal dari mata bukan? Kita sebagai manusia tahu arah kita berjalan karena kita memiliki mata. Yaah, sama seperti robot.
Pada robot line follower, sensor robot yang dapat digunakan ada 3 jenis, yaitu LDR (Light Dependent Resistor), Photo Dioda, dan Photo Transistor. Saya tidak akan menjelaskan satu” secara detail, di sini kita gunakan photo dioda sebagai sensor robot. Kalau yang masih penasaran dengan sensor lainnya, silahkan tanya om google saja. ![]()
 Nah..gambar di samping kanan adalah 1 pasang sensor yang akan kita gunakan pada robot line follower. Bentuknya mirip seperti LED, yang berwarna ungu bernama receiver (photo dioda) dan yang berwarna bening bernama transmitter (infrared). Kalau pembaca ingin membeli di toko elektronik, bilang saja 1 pasang infrared sensor. Untuk membuat robot ini, kita gunakan 4 pasang sensor seperti di kanan. Sip? Murah koQ, satu pasangnya 3 ribu rupiah..hehe..
Nah..gambar di samping kanan adalah 1 pasang sensor yang akan kita gunakan pada robot line follower. Bentuknya mirip seperti LED, yang berwarna ungu bernama receiver (photo dioda) dan yang berwarna bening bernama transmitter (infrared). Kalau pembaca ingin membeli di toko elektronik, bilang saja 1 pasang infrared sensor. Untuk membuat robot ini, kita gunakan 4 pasang sensor seperti di kanan. Sip? Murah koQ, satu pasangnya 3 ribu rupiah..hehe.. ![]()
Kemudian, setelah kita mengetahui sensor apa yang akan kita pakai, coba buat dulu rangkaian seperti di bawah ini untuk setiap 1 pasang sensor :
 Nah, untuk 4 pasang sensor..kita perlu membuat 4 rangkaian seperti di samping kiri ini. Cara kerjanya cukup sederhana, hanya berdasarkan pembagi tegangan. Penjelasan di paragraf berikutnya aja yaa..hehe..
Nah, untuk 4 pasang sensor..kita perlu membuat 4 rangkaian seperti di samping kiri ini. Cara kerjanya cukup sederhana, hanya berdasarkan pembagi tegangan. Penjelasan di paragraf berikutnya aja yaa..hehe.. ![]() Lambang LED yang berwarna hitam adalah transmitter atau infrarednya yang memancarkan cahaya infrared terus menerus jika disusun seperti rangkaian di samping. Lambang LED yang kanan adalah receiver atau photo dioda-nya yang menangkap cahaya infrared yang ada di dekatnya. INGAT masang photo dioda-nya HARUS terbalik, seperti gambar rangkaian di samping. Dari rangkaian sensor ini, kita ambil OUTPUT (to comparator, A/D converter, dll) yang ditunjukkan oleh gambar di samping.
Lambang LED yang berwarna hitam adalah transmitter atau infrarednya yang memancarkan cahaya infrared terus menerus jika disusun seperti rangkaian di samping. Lambang LED yang kanan adalah receiver atau photo dioda-nya yang menangkap cahaya infrared yang ada di dekatnya. INGAT masang photo dioda-nya HARUS terbalik, seperti gambar rangkaian di samping. Dari rangkaian sensor ini, kita ambil OUTPUT (to comparator, A/D converter, dll) yang ditunjukkan oleh gambar di samping.
Sekarang pertanyaannya, koQ lucu yaa sensor CUPU kaya gitu bisa baca garis? ![]() Cara kerjanya ditunjukkan oleh gambar di bawah ini.
Cara kerjanya ditunjukkan oleh gambar di bawah ini. ![]()
 Ketika transmitter (infrared) memancarkan cahaya ke bidang berwarna putih, cahaya akan dipantulkan hampir semuanya oleh bidang berwarna putih tersebut. Sebaliknya, ketika transmitter memancarkan cahaya ke bidang berwarna gelap atau hitam, maka cahaya akan banyak diserap oleh bidang gelap tersebut, sehingga cahaya yang sampai ke receiver tinggal sedikit. Nah, artinya kita sudah bisa membedakan pembacaan garis dari sensor bukan? Kalau kita sudah tahu, perbedaan cahaya yang diterima oleh receiver akan menyebabkan hambatan yang berbeda-beda di dalam receiver (photo dioda) tersebut. Ilustrasinya seperti gambar di bawah ini.
Ketika transmitter (infrared) memancarkan cahaya ke bidang berwarna putih, cahaya akan dipantulkan hampir semuanya oleh bidang berwarna putih tersebut. Sebaliknya, ketika transmitter memancarkan cahaya ke bidang berwarna gelap atau hitam, maka cahaya akan banyak diserap oleh bidang gelap tersebut, sehingga cahaya yang sampai ke receiver tinggal sedikit. Nah, artinya kita sudah bisa membedakan pembacaan garis dari sensor bukan? Kalau kita sudah tahu, perbedaan cahaya yang diterima oleh receiver akan menyebabkan hambatan yang berbeda-beda di dalam receiver (photo dioda) tersebut. Ilustrasinya seperti gambar di bawah ini.
Kalau cahaya yang dipancarkan ke bidang putih, sensor akan :
 Sebaliknya, kalau cahaya yang dipantulkan oleh bidang hitam, maka sensor akan :
Sebaliknya, kalau cahaya yang dipantulkan oleh bidang hitam, maka sensor akan :
 Setelah kita tahu ilustrasi sensor, tinjau kembali rangkaian sensornya, bisa kita analogikan seperti :
Setelah kita tahu ilustrasi sensor, tinjau kembali rangkaian sensornya, bisa kita analogikan seperti :
 Tadi kita tahu kalau hambatan receiver berubah-ubah, jadi otomatis rangkaian sensor yang bagian kanan bisa kita analogikan seperti gambar. Receiver bisa kita analogikan dengan resistor variabel, yaitu resistor yang nilai hambatannya bisa berubah. Otomatis, dengan pembagi tegangan, nilai tegangan di output rangkaian juga akan berubah-ubah bukan? Jadi, baca putih akan mengeluarkan output dengan tegangan rendah (sekitar 0 Volt) dan baca hitam akan mengeluarkan output dengan tegangan tinggi (mendekati Vcc = 5 Volt). Kalau rangkaian sensor pembaca sudah jadi, bisa dibandingkan dengan punya saya yang ditunjukkan oleh gambar di bawah ini.
Tadi kita tahu kalau hambatan receiver berubah-ubah, jadi otomatis rangkaian sensor yang bagian kanan bisa kita analogikan seperti gambar. Receiver bisa kita analogikan dengan resistor variabel, yaitu resistor yang nilai hambatannya bisa berubah. Otomatis, dengan pembagi tegangan, nilai tegangan di output rangkaian juga akan berubah-ubah bukan? Jadi, baca putih akan mengeluarkan output dengan tegangan rendah (sekitar 0 Volt) dan baca hitam akan mengeluarkan output dengan tegangan tinggi (mendekati Vcc = 5 Volt). Kalau rangkaian sensor pembaca sudah jadi, bisa dibandingkan dengan punya saya yang ditunjukkan oleh gambar di bawah ini. ![]()

Processor yang kita gunakan di sini bukanlah processor” canggih seperti intel dan amd. ![]() Bahkan, kita sama sekali TIDAK menggunakan mikrokontroler, karena saya anggap mikrokontroler cukup rumit untuk ukuran smp dan sma. Dalam hal ini, kita gunakan 2 IC (integrated circuit) saja, yaitu 1 buah LM339 (Komparator) dan 1 buah 74LS00 (NAND gate). Simple bukan?
Bahkan, kita sama sekali TIDAK menggunakan mikrokontroler, karena saya anggap mikrokontroler cukup rumit untuk ukuran smp dan sma. Dalam hal ini, kita gunakan 2 IC (integrated circuit) saja, yaitu 1 buah LM339 (Komparator) dan 1 buah 74LS00 (NAND gate). Simple bukan? ![]() Di bawah ini gambar kedua IC tersebut :
Di bawah ini gambar kedua IC tersebut :

IC LM339 biasa disebut sebagai komparator. Yah, dari istilahnya saja sudah ketahuan kalau gunanya adalah untuk meng-compare (membandingkan). Dengan kata lain, sesuatu yang berbentuk analog harus dikonversi dulu ke dalam bentuk digital (deretan biner) pada dunia elektronika. Hal ini bertujuan untuk mempermudah processing. ![]() Gambar di bawah ini adalah datasheet LM339. Coba perhatikan dulu sebentar
Gambar di bawah ini adalah datasheet LM339. Coba perhatikan dulu sebentar ![]()
 Nah, 1 IC LM339 terdiri dari 4 buah komparator (yang berbentuk segitiga
Nah, 1 IC LM339 terdiri dari 4 buah komparator (yang berbentuk segitiga ![]() ). Knapa kita hanya gunakan 1 buah IC ini? Soalnya kita juga hanya menggunakan 4 buah sensor. Kemudian, tinjau bagian komparator yang di sebelah kanan.
). Knapa kita hanya gunakan 1 buah IC ini? Soalnya kita juga hanya menggunakan 4 buah sensor. Kemudian, tinjau bagian komparator yang di sebelah kanan.
Satu buah komparator terdiri dari 2 input, yaitu Vin (input masukan dari sensor) dan Vref (tegangan referensi). Pada dasarnya, jika tegangan Vin lebih besar dari Vref, maka Vo akan mengeluarkan logika 1 yang berarti 5 Volt atau setara dengan Vcc. Sebaliknya, jika tegangan Vin lebih kecil dari Vref, maka output Vo akan mengeluarkan logika 0 yang berarti 0 Volt. Knapa kita bisa membandingkan seperti ini? Nah, seperti yang sudah saya bahas di poin sensor, sensor akan menghasilkan tegangan yang berbeda-beda ketika dia membaca bidang putih atau hitam kan? ![]()
Kemudian, jangan lupa untuk menambahkan resistor pull-up di keluaran komparator (Vo). Hal ini disebabkan oleh perilaku IC LM339 yang hanya menghasilkan logika 0 dan Z (bukan logika 1), sehingga si logika Z ini harus kita tarik ke Vcc dengan resistor pull-up agar menghasilkan logika 1. Sip? ![]()
Setelah digabung dengan sensor, ilustrasi rangkaian menjadi seperti ini.

IC 74LS00 merupakan “NAND gate” yang berguna dalam teknologi digital. NAND gate terkait dengan logika 0 dan 1 serta merupakan gate yang paling simple dan bisa merepresentasikan semua jenis gate yang ada. Saya rasa bocah smp atau sma blom bisa memahami bagian ini. Jadi saya skip saja.. ![]() Di bawah ini adalah datasheet IC 74LS00.
Di bawah ini adalah datasheet IC 74LS00.

Sekarang kita tinjau, bagaimana cara motor bekerja ketika robot berbelok ke kiri dan ke kanan. Lihat ilustrasi di bawah ini ketika robot akan berbelok ke arah kanan.
 Kemudian, lihat ilustrasi di bawah ini ketika robot akan berbelok ke arah kiri.
Kemudian, lihat ilustrasi di bawah ini ketika robot akan berbelok ke arah kiri.
 Nah..Ketika robot bergerak lurus, motor akan menyala dua”nya.
Nah..Ketika robot bergerak lurus, motor akan menyala dua”nya.

Nah..Sekarang knapa tiba” muncul transistor?! ![]()
Jawabannya cukup simple. Output dari IC NAND tidak mungkin kuat untuk mendrive transistor. Kalau saya tidak salah, output IC hanya sekitar 2 V. Jadi, kita membutuhkan sambungan langsung motor ke baterai untuk menggerakkannya. Knapa kita pakai transistor? Ada yang tahu apa guna transistor? ![]()
Transistor dapat berfungsi sebagai saklar / switch on off. Motor tidak menyala terus menerus bukan? Sudah saya jelaskan di bab sebelumnya, pada jalur tertentu motor akan mati dan menyala. Nah,, nyala mati motor tersebut diatur oleh transistor. Transistor yang digunakan di sini adalah NPN. Pada dunia elektronika, transistor terdiri dari dua jenis, yaitu PNP dan NPN. Berikut ilustrasi gampangnya terkait dengan motor.
 Jadi, sejauh ini kita punya rangkaian lengkap seperti di bawah ini.
Jadi, sejauh ini kita punya rangkaian lengkap seperti di bawah ini.

9. Mekanik
Hmm..
sebenarnya,,jujur saja saya kurang mengerti bagian mekanik. Soalnya saya bukan orang mesin..hehe.. ![]() Saya cuma tahu sedikit tips, yaitu buat gear yang besar” agar torsi-nya besar. Jadi, robotnya bisa berbelok dengan kuat. Kalau torsi kecil, robot akan sulit untuk berbelok. Gampangnya gitu aja..hehe..
Saya cuma tahu sedikit tips, yaitu buat gear yang besar” agar torsi-nya besar. Jadi, robotnya bisa berbelok dengan kuat. Kalau torsi kecil, robot akan sulit untuk berbelok. Gampangnya gitu aja..hehe.. ![]()
10. PCB Layout
Berikut ini pcb layout dari sensor robot line follower, terdiri dari 4 sensor. Layout PCB ini dibuat dengan menggunakan software eagle.
 Di bawah ini layout pcb dari rangkaian processor, yang terdiri dari 1 IC NAND dan 1 IC komparator.
Di bawah ini layout pcb dari rangkaian processor, yang terdiri dari 1 IC NAND dan 1 IC komparator.
 yang jadinya akan seperti gambar di bawah ini
yang jadinya akan seperti gambar di bawah ini

oke..sekian tulisan saya tentang membuat robot line follower sederhana. Kalau ada pembaca yang ingin bertanya silahkan.. Saya akan menjawab dengan senang hati..hehe.. ![]() sampai jumpah di tulisan robot saya lainnya..
sampai jumpah di tulisan robot saya lainnya.. ![]()
Pengenalan Tentang Robot
Buat para pembaca sekalian sebelumnya saya sudah terlebih dahulu mem-posting artikel mengena cara-cara merangkai robot sederhana. akan tetapi saya sudah lupa mengenalkan mengenai robot itu sendiri. berikut penjelasannya:
Seiring pesatnya perkembangan teknologi informasi serta otomasi industri dimana komputer menjadi bagian yang tidak terpisahkan dari teknologi itu sendiri membuat integrasi komputer dengan disiplin ilmu lain seperti elektronika, pemrograman dan mekanika tidak bisa dihindari. Munculnya mekatronika dengan wujud robot sebagai bentuk implementasinya mendorong kami mengembangkan robotika sebagai bagian dari dunia pendidikan kita. Kami tampil sebagai yang pertama di Indonesia yang menyediakan dan menyalurkan kegemaran dan pengetahuan robotika serta merancang standar kurikulum bagi pelajar SD, SMP, SMU hingga mahasiswa perguruan tinggi
Sebagai objek pelatihan dan pendidikan, siswa/mahasiswa dituntut aktif, kreatif dan terlibat langsung dalam proses perakitan, pengoperasian, dan mempraktekan latihan-latihan yang tersedia dalam modul. Setiap modul dibuat sesuai tingkat kemampuan siswa. Pengajaran ditingkat SD, lebih pada bermain robot tetapi tetap menjaga unsur pendidikan. Pada tingkat SMU, siswa mulai diberi pengantar pemrograman dan pengenalan teknologi dengan mempelajari struktur pemrograman, perakitan serta bekerja dalam kelompok. Pada tingkat perguruan tinggi, modul mengajak mahasiswa tidak hanya mengerti prinsip dasar robotika dan pemrograman namun juga ditantang untuk memodifikasi program dan konstruksi robot. Pemrograman micro-controller menjadi pilihan dimana mahasiswa diajak untuk belajar pemrograman microcontroller mulai dari yang sangat sederhana mengaktifkan flip-flop hingga menjalankan manipulator robot. Selain itu, pelatihan micro-controller dengan robotics kit memberikan banyak kemungkinan dan sangat bervariasi.
Robotika adalah multidisiplin dengan komputer, elektronika dan mekanika sebagai ilmu dasarnya. Namun begitu tidak terbatas bagi pengajar untuk melibatkan ilmu-ilmu lain seperti biologi dan anatomi. Dengan robotics walker kit, para guru/dosen dapat melibatkan siswanya untuk mengamati gerakan kaki serangga dan mensimulasikannya sebelum diprogram ke robot walking kit (2 kaki, 4 kaki atau 6 kaki).
Belajar pemrograman dengan objek robot membuat proses belajar menjadi lebih menarik dan nyata. Mulai dengan pemrograman Basic hingga ke pemrograman C, siswa secara bertahap belajar pemrograman sehingga pemahaman komputer hanya untuk mengetik dan bermain akan bergeser menjadi pemikiran bahwa komputer telah menjadi bagian dari teknologi sistem kontrol dan akusisi data.
Robotics kit dapat juga digunakan dalam implementasi artificial intelligent (AI), sistem sensor, model sistem otomasi kontrol dan bagi yang sekedar hobi, kit dapat ditambahkan aksesories seperti sensor, kamera, motor, rangkaian elektronika hingga kepengembangan software dan modifikasi kit.
Cara Kerja & Biaya Bikin Robot
 Langkah yang terpenting ialah menentukan Algoritma/ program. Kamu mau memprogram robotmu seperti apa, niiih, simak salah satu contohnya yang diberi oleh Bapak Nemuel Daniel Pah, Ph.D dosen pembimbing rekan-rekan kita yang menang sebagai Best Innovation robot KCRI 2007.
Langkah yang terpenting ialah menentukan Algoritma/ program. Kamu mau memprogram robotmu seperti apa, niiih, simak salah satu contohnya yang diberi oleh Bapak Nemuel Daniel Pah, Ph.D dosen pembimbing rekan-rekan kita yang menang sebagai Best Innovation robot KCRI 2007.
Cara kerjanya :
Kita mesti bikin skema dulu, trus menghubungkan komponen lalu mencetak PCB (Printed Circuit Board) alias papan rangkaian. PCB emang bisa di download gratis dari internet, tapi itu nggak lengkap dibandingkan kalo kita beli. Lalu pasang komponen dan berikan urutan program (algoritma).
Algoritma berjalan :
Robot ini berjalan dengan menggunakan kedua kakinya.
Untuk berjalan, robot berada pada posisi siap. Setelah itu lengan diayun ke belakang dan kaki depan melangkah ke depan. Sehingga robot akan bertumpu pada kaki belakang. Lengan diayun ke depan, dan beban pindah ke depan. Robot ganti bertumpu pada kaki depan. Kaki belakang menutup dan robot kembali pada posisi siap.
Robot berjalan berdasarkan pembacaan sensor kaki kanan dan kiri.
Sensor kiri akan aktif bila dekat dengan dinding. Respon yang diberikan adalah serong kanan.
Sensor kanan akan aktif bila dekat dengan dinding. Respon yang diberikan adalah serong kiri.
Begitu juga dengan sensor depan. Respon yang diberikan adalah belok kanan atau belok kiri.
Sensor yang terpasang pada lengan, digunakan untuk mendeteksi apakah yang di samping robot tersebut dinding atau ruangan atau perempatan.
Bila lengan diayun ke belakang, kaki belakang jadi tumpuan.
Bila lengan diayun ke depan, kaki depan jadi tumpuan.

Cara robot belok ato serong ;
-
Robot berada pada posisi siap.
-
Lengan diayunkan ke belakang.
-
Telapak berputar 900(untuk belok) dan 30(untuk serong).
-
Lengan diayunkan ke depan.
-
Telapak kaki diluruskan kembali.
 Algoritma mematikan api ;
Algoritma mematikan api ;
Sensor UV-Tron
Mendeteksi adanya api pada suatu ruangan, robot berjalan mendekati api dengan cara mengikuti dinding. Setelah menemukan daerah putih, robot akan berjalan satu langkah lagi sebelum mulai menscan letak api.
Scan api
Dilakukan dengan cara badan robot berputar ke kiri dan perlahan-lahan berputar ke kanan. Data yang di peroleh oleh foto dioda akan disimpan. Data tertinggi menunjukkan posisi api. Dan robot akan menghadap pada api (data tertinggi yang diperoleh oleh foto dioda).
Motor penyemprot air mulai berputar dan air disemprotkan. Sambil menyemprot, badan berputar ke kiri 3 derajat dan ke kanan 3 derajat.
 Jika robot telah menemukan dan memadamkan api di salah satu ruang maka robot akan langsung kembali ke home. Tanpa memasuki ruang yang lain. Nih gambar alur jalannya.
Jika robot telah menemukan dan memadamkan api di salah satu ruang maka robot akan langsung kembali ke home. Tanpa memasuki ruang yang lain. Nih gambar alur jalannya.

Jika ada kerusakan komponen gimana mengetahuinya?
Untuk mengatasi trouble shooting, kita harus punya skill strategi yang paling pendek tapi jitu. Tingkat kepekaan ini yang perlu dilatih setiap orang. Misal, jika ada trouble, pertama, harus batasi dulu segala kemungkinan memperkirakan letak kerusakan ada dimana. Seperti, motor yang salah, komponen terbakar, kabel terputus ato yang lain. Lalu menyelidikinya.
Waktu dan Pengerjaannya
Untuk robot sederhana, jika bahan-bahannya udah tersedia dan tinggal mengerjakan aja, bisa sampai 2 mingguan, yang bikin lama tuh pesen sensor. Tapi, pengerjaan robot yang mempunyai tuntutan tugas berat, misalnya harus melewati jalan yang rumit dan tidak boleh menabrak benda, bisa-bisa 6-12 bulan pengerjaannya, karena sulit di algoritma. Rekan-rekan yang bikin Q_Lan untuk dilombakan di KCRI memakan waktu selama 1 tahun, karena mereka harus membagi waktu antara kuliah dan pengerjaan robot.
Tapi kalo pengen fokus untuk mengerjakan robot seperti Q_Lan dalam waktu 1 bulan, udah bisa selesai. Untuk mengerjakan proyek yang dikompetisikan, minimal 3 orang yang terdiri dari mekanik, program dan manajemennya (pembelian bahan). Kalo robot besar bisa sampe 7 orang bahkan lebih.
Kelemahan dan Kelebihan
Sumber daya robot tuh berbeda-beda. Misal, robot sederhana itu kelebihannya hanya memakai baterai biasa AA. Kelemahannya, dipakai sebentar cepat habis. Selain itu robot sederhana hanya bisa menggunakan maksimum 2 motor yang bisa berjalan maju ato mundur saja, seperti mainan anak-anak.
Tapi kalo robot yang agak rumit bisa memakai banyak motor, perlu daya baterai yang lebih besar dan berat. Baterai yang dipake kecil, ringan arusnya besar tapi mahal harganya. Namun, keunggulannya semakin banyak motor semakin banyak sendi ato gerakannya, jadi bisa berputar maupun berbelok.
BUDGET Robot Q_Lan
Jika T-Clubs tertarik bikin robot seperti Q_Lan, mesti menyiapkan kocek sekitar Rp 2.412.000 untuk membeli bahan-bahan berikut ini ;
Rangka Acrylic Rp 100.000
Motor Servo 3 buah @ Rp 200.000
Sensor api UVT ron Rp 800.000
Micro water pump Rp 200.000
Mikroprosesor MCS51 Rp 50.000
Sensor IR 8 buah @ Rp 5.000
Sensor suara 1 buah Rp 2.000
Baterai LiPo 2 buah @ Rp 300.000
Driver motor Rp 20.000
Nah, T-MoRe udah jelasin panjang lebar tentang robot Q_Lan yang pernah menang di KCRI. Gimana dengan para robot mania? Jangan cuman terpesona dengan kecanggihan teknologi aja loh. Mari ciptakan inovasi baru untuk Indonesia. Siap mencoba?
Nah...buat kamu yang pengen kenal lebih dekat, siapa sih yang bikin Q_Lan ini. Siapa tau neh, dari topik pembicaraan T-MoRe bareng Yonas (pemenang Best Innovation KCRI dan pak Nemuel pembimbingnya, bisa bikin kamu terinspirasi untuk membuat robot sederhana kayak mereka
Robot Line Follower Sederhana
Mengenal Komponen Elektronika
Resistor
Resistor adalah komponen elektronika yang berfungsi untuk memberikan hambatan terhadap aliran arus listrik. Dalam rangkaian listrik dibutuhkan resistor dengan spesifikasi tertentu, seperti besar hambatan, arus maksimum yang boleh dilewatkan dan karakteristik hambatan terhadap suhu dan panas. Resistor memberikan hambatan agar komponen yang diberi tegangan tidak dialiri dengan arus yang besar, serta dapat digunakan sebagai pembagi tegangan.
Kapasitor
kapasitor adalah komponen elektrik yang berfungsi untuk menyimpan muatan listrik. Salah satu jenis kapasitor adalah kapasitor keeping sejajar. Kapasitor ini terdiri dari dua buah keping metal sejajar yang dipisahkan oleh isolator yang disebut dielektrik. Bila kapasitor dihubungkan ke batere kapasitor terisi hingga beda potensial antara kedua terminalnya sama dengan tegangan batere. Jika batere dicabut, muatan-muatan listrik akan habis dalam waktu yang sangat lama, terkecuali bila sebuah konduktor dihubungkan pada kedua terminal kapasitor.
Dioda
Dioda adalah devais semikonduktor yang mengalirkan arus satu arah saja. Dioda terbuat dari Germanium atau Silicon yang lebih dikenal dengan Dioda Junction. Dioda juga digunakan pada adaptor yang berfungsi sebagai penyearah dari sinyal AC ke DC.
LED (Light Emitting diode)
LED merupakan komponen yang dapat mengeluarkan emisi cahaya. LED merupakan produk temuan lain setelah dioda. Strukturnya juga sama dengan dioda, tetapi belakangan ditemukan bahwa elektron yang menerjang sambungan P-N juga melepaskan energi berupa energi panas dan energi cahaya. LED dibuat agar lebih efisien jika mengeluarkan cahaya. Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang pakai adalah galium, arsenic dan phosporus. Jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula.
Pada saat ini warna-warna cahaya LED yang banyak ada adalah warna merah, kuning dan hijau.LED berwarna biru sangat langka. Pada dasarnya semua warna bisa dihasilkan, namun akan menjadi sangat mahal dan tidak efisien. Dalam memilih LED selain warna, perlu diperhatikan tegangan kerja, arus maksimum dan disipasi dayanya.
Relay
Transistor tidak dapat berfungsi sebagai sebagai switch (saklar) tegangan DC atau tegangan tinggi .Selain itu, umumnya tidak digunakan sebagai switching untuk arus besar (>5 A). Dalam hal ini, penggunakan relay sangatlah tepat. Relay berfungsi sebagai saklar yang bekerja berdasarkan input yang dimilikinya.
Keuntungan relay :
- dapat switch AC dan DC, transistor hanya switch DC
- Relay dapat switch tegangan tinggi, transistor tidak dapat
- Relay pilihan yang tepat untuk switching arus yang besar
- Relay dapat switch banyak kontak dalam 1 waktu
Kekurangan relay :
- Relay ukurannya jauh lebih besar daripada transistor
- Relay tidak dapat switch dengan cepat
- Relay butuh daya lebih besar disbanding transistor
- Relay membutuhkan arus input yang besar
Transistor
Transistor bipolar biasanya digunakan sebagai saklar elektronik dan penguat pada rangkaian elektronika digital. Transistor memiliki 3 terminal. Transistor biasanya dibuat dari bahan silikon atau germanium. Tiga kaki yang berlainan membentuk transistor bipolar adalah emitor, basis dan kolektor. Mereka dapat dikombinasikan menjadi jenis N-P-N atau P-N-P yang menjadi satu sebagai tiga kaki transistor. Gambar di bawah memperlihatkan bentuk dan simbol untuk jenis NPN. (Pada transistor PNP, panah emitor berlawanan arah).

Gambar Simbol Transistor NPN dan PNP
Pada rangkaian elektronik, sinyal inputnya adalah 1 atau 0 ini selalu dipakai pada basis transistor, yang mana kolektor dan emitor sebagai penghubung untuk pemutus (short) atau sebagai pembuka rangkaian. Aturan/prosedur transistor sebagai berikut:
· Pada transistor NPN, memberikan tegangan positif dari basis ke emitor, menyebabkan hubungan kolektor ke emitter terhubung singkat, yang menyebabkan transistor aktif (on). Memberikan tegangan negatif atau 0 V dari basis ke emitor menyebabkan hubungan kolektor dan emitor terbuka, yang disebut transistor mati (off)
· Pada PNP transistor PNP, memberikan tegangan negatif dari basis ke emitor ini akan menyalakan transistor (on ). Dan memberikan tegangan positif atau 0 V dari basis ke emitor ini akan membuat transistor mati (off).
Mengenal Sensor Cahaya
Resistor jenis lainnya adalah Light dependent resistor (LDR). Resistansi LDR berubah seiring dengan perubahan intensitas cahaya yang mengenainya. Dalam keadaan gelap resistansi LDR sekitar 10MΩ dan dalam keadaan terang sebesar 1KΩ atau kurang. LDR terbuat dari bahan semikonduktor seperti kadmium sulfida. Dengan bahan ini energi dari cahaya yang jatuh menyebabkan lebih banyak muatan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah mengalami penurunan.
LDR digunakan untuk mengubah energi cahaya menjadi energi listrik. Saklar cahaya otomatis dan alarm pencuri adalah beberapa contoh alat yang menggunakan LDR. Akan tetapi karena responsnya terhadap cahaya cukup lambat, LDR tidak digunakan pada situasi dimana intesitas cahaya berubah secara drastis.

Gambar Sensor Cahaya LDR
Sensor cahaya berfungsi untuk mendeteksi cahaya yang ada di sekitar kita. Sensor yang terkenal untuk mendeteksi cahaya ialah LDR(Light Dependent Resistor). Sensor ini akan berubah nilai hambatannya apabila ada perubahan tingkat kecerahan cahaya.
Prinsip inilah yang akan kita gunakan untuk mengaktifkan transistor untuk dapat menggerakkan motor DC (mirip dengan dinamo pada mainan mobil-mobilan anak-anak). Perubahan nilai hambatan pada LDR tersebut akan menyebabkan perubahan beda tegangan pada input basis transistor, sehingga akan mengaktif/nonaktifkan transistor. Penerapan lain dari sensor LDR ini ialah pada Alarm Pencuri.
Robot Line Follower Berbasis LDR
Rangkaian Robot Line follower pada intinya ialah 2 buah motor DC yang aktif berdasarkan input dari sensor LDR, jika LDR mendeksi garis putih (terang) dan garis hitam(gelap) maka akan ada perubahan nilai hambatan pada LDR tersebut, yang akan mengaktif/menonaktifkan transistor 2N3904. Untuk mengatur input tegangan ke basis agar dapat membuat transistor 2N3904 saturasi, maka digunakan pembagi tegangan, dalam hal ini trimpot / potensiometer 50k-100k. Perubahan logika pada transistor 2N3904 juga akan menyebabkan LED menyala atau mati, sebagai indikator apakah LDR membaca garis hitam/putih. Perubahan logika pada kaki kolektor 2N3904 juga sebagai input pada basis 2N2907, yang akan mengaktifkan/menonaktifkan motor DC, dimana transistor 2N2907 merupakan transistor switching standar. Perhatikan gambar berikut:

Gambar Rangkaian Line Follower dengan LDR
Anda dapat menggunakan sebagian barang bekas untuk membuat robot ini, misalnya menggunakan roda BB REXONA sebagai roda robot. Komponen dan peralatan lengkap yang diperlukan ialah :
ü 2 buah sensor cahaya LDR
ü PCB IC bolong
ü 2 buah transistor 2N3904
ü 2 buah transistor 2N2907
ü 2 buah Trimpot/potensiometer 50k-100k
ü 2 buah resistor 3.3K
ü 2 buah resistor 1K
ü 2 buah LED (Light Emiting Dioda)
ü Spacer (kaki PCB)
ü Acrilic body robot ukuran diameter 20 cm.
ü Solder, timah solder dan kabel secukupnya
ü Kotak baterai 6V
ü Roda bekas penghilang BB REXONA
ü 2 buah motor DC dengan gearbox GT1 dan roda untuk GT1
Atau
ü 2 buah motor DC dengan gearbox GT5 dan rubber Wheel untuk GT5 (lebih bagus)
ü Bor PCB
ü Lem Lilin
ü Multitester analog /digital
Perakitan
Langkah-langkah untuk merakit robot ini sebagai berikut :
1. Siapkan PCB IC bolong, lalu pasang dan solderlah komponen sesuai rangkaian diatas.
2. Beri tegangan 6V, atur pemberian cahaya pada LDR tersebut dengan membuka atau menutup permukaan LDR tersebut dengan jari atau kertas, atur trimpot/potensiometer sehingga hasilnya optimal. Bagian ini ialah bagian yang paling kritis di dalam pembuatan robo tini, karena kalau tuning tidak tepat, aka robot beralan tidak sesuai jalur yang dibuat.
3. Jika sudah selesai, pasanglah apda acrilic dengan tampilan seperti berikut :

Gambar Desain Robot Line Follower dengan LDR
4.Pasanglah PCB dan pendukungnya pada acrilic. Hubungkan kabel motor DC ke keluaran PCB. Hubungkan baterai 6V ke input Supply PCB.

Gambar Robot Line Follower dengan LDR tampak bawah
5. Jika sudah dirakit cobalah jalankan pada lantai yang sudah dipasang jalur hitam berkelok (dapat menggunakan lakban), maka robot akan beralan mengikuti jalur tersebut. Jika sensor kurang sensitif, putarlah perlahan-lahan trimpot/potensiometer robot tersebut, untuk hasil yang optimal. Pastikan sensor LDR berada cukup dekat dengan lantai. Jika putaran motor terlalu cepat, Anda dapat mengatur besar tegangan motor DC tersebut, misal menggunakan IC variabel regulator LM317.

Gambar Hasil Robot Line follower Sederhana
Latihan:
Yang membuat Anda mahir elektronika, tidak lain ialah pengalaman dalam bereksprimen dan ketekunan. Untuk itu Anda diharapkan menjawab dan mengerjakan semua latihan ini.
- Akseslah situs google.com / yahoo.com untuk mencari informasi komponen elektronika untuk dapat menjelaskan cara kerja dari :
- Resistor
- Kapasitor elektrolit
- Kapasitor keramik
- Transistor NPN
- Transistor PNP
- MOSFET
- FET
- Sensor LDR
- IC (Integrated Circuit)
- Jelaskan pula arti dari perbedaan simbol LS, HC dan HCT pada IC TTL.
- Pelajari fungsi IC penguat operasional (OP-AMP) seperti LM741, LM 393N dan LM 324.
- Buatlah rangkaian penguat transistor dengan penguatan 100.
- Buatlah rangkaian robot pengejar cahaya berbasis sensor LDR dimana robot akan bergerak mengejar sumber cahaya.
Rangkain Pengusir Tikus Elektronik

Binatang yang satu ini memang sangat binal dan menyebalkan. "Aksi mesum" nya bisa macam-macam mulai dari buang kotoran di mana-mana, mengobrak-abrik lemari pakaian dan gudang, menyebarkan penyakit (pes), dan sebagainya. Pokoknya selalu bikin onar! Nggak usah bingung ato sewot. Salah satu alternatif untuk mengatasinya adalah dengan menggunakan pengusir tikus elektronik. Selain ramah lingkungan, alat ini juga bisa digunakan sebagai penyaluran hobby dan belajar elektronika.
Komponen elektronika yang dibutuhan untuk membangun rangkaian pengusir tikus elektronik tidak banyak, cukup murah dan mudah didapatkan di toko-toko elektronik. Skema rangkaian elektroniknya bisa dilihat langsung pada gambar di atas. Rangkaian bisa dibangun pada sebuah PCB dot matrix atau bikin layout dulu dengan munggunakan PCB polos. Dalam beberapa hari setelah pemasangan alat ini (secara terus menerus) akan terlihat hasilnya. Para tikus dan kerabatnya pasti akan enyah entah kemana dan rumahpun terbebas dari binatang paling menyebalkan.
Secara sederhana rangkaian pengusir tikus adalah sebuah oscilator yang mengeluarkan gelombang ultrasonic pada kisaran frekuensi 20 - 40 KHz. Gelombang ultrasonic yang dihasilkannya tidak akan terdengar di telinga kita tapi akan sangat mengganggu sekali bagi telinga tikus. Base Frequency lalu dimodulir dengan signal 50 Hz yang didapat dari frekuensi tegangan jala-jala PLN melalui kapasitor C4 (untuk menghindari tikus menjadi kebal terhadap alat ini) sehingga akan dihasilkan ayunan frekuensi antara 20 - 40 KHz secara periodik. Efek yang dialami tikus akan terasa sangat dasyat, seolah-olah seperti kita berada pada sebuah konser music amburadul dengan irama yang acak-acakan dan tidak bisa dinikmati sama sekali, plus sa'at itu kita lagi sakit gigi!! Bisa dibayangkan? Yup, music trust-metal mungkin masih jauh lebih indah dibanding suara alat ini (menurut telinga tikus sih, kalo di telinga manusia tidak akan terdengar sama sekali). Kira-kira seperti itu, persisnya ya nggak tau karena saya belum belum pernah merasakan jadi tikus, ha-ha-ha!
Jantung rangkaian pengusir tikus elektronik adalah sebuah IC tipe 555 yang sudah sangat populer, murah dan serba guna.  Daftar lengkap komponen elektronika yang diperlukan berikut ini.
Daftar lengkap komponen elektronika yang diperlukan berikut ini.
R1 ... 1K
R2,R3 ... 15K
C1 ... 1nF
C2 ... 1uF/16V
C3 ... 10nF
C4 ... 220nF
C5 ... 1000uF/16V
D1..D4 ... 1N 4001
IC1 ... 555
Tr1 ... Trafo 6V/200mA
TD1 ... speaker tweeter bentuk corong
F1 ... Fuse/sekring 50 mA
Gunakan loudspeaker dari piezo electric atau speaker tweeter bentuk corong agar frekuensi ultrasonic-nya lebih nendang dan efektif. Pengusir tikus elektronik ini efektif untuk ruangan seluas maksimal 200 m2 asal penempatannya tepat. Bisa diletakkan misalnya di pojok atas ruangan agar frekuensi noise-nya bisa menyebar ke seluruh ruangan tanpa halangan. Nyalakan secara terus menerus untuk menjaga agar tikus tidak datang lagi, tidak usah khawatir dengan konsumsi listriknya karena daya listrik yang dibutuhkan cukup rendah, masih lebih besar lampu bohlam 5 watt/220 volt. Pengaturan frekuensi dsb. tidak diperlukan.
Setelah selesai merakit, ingat cek sekali lagi dan pastikan semua komponen dan sambungan elektroniknya terpasang dengan benar tanpa salah sedikitpun sebelum mengoperasikannya pertama kali. Untuk ngecek keluarannya bisa dengan mengganti kapasitor C1 dengan nilai yang lebih besar misalnya 10nF, maka suara yang dikeluarkan akan masuk pada daerah ambang pendengaran manusia, setelah itu kembalikan lagi kapasitor seperti semula yaitu 1nF. Jika telah selesai semua, rangkaian bisa ditaruh pada sebuah box ABS (Asal Bapak Senang) agar terlihat keren...:-)Automatic Lamp Circuit

Kali ini saya tampilkan rangkaian lampu otomatis buat dicobain. Rangkaian ini tidak sama dengan 'rangkaian emergency light' yang sudah kita bahas sebelumnya meskipun on-off-nya sama-sama bekerja secara otomatis tapi proyek kita kali ini bekerja berdasarkan kondisi gelap terang lingkungan sekitarnya. Contoh penerapannya adalah digunakan pada lampu taman yang akan menyala di malam hari dan padam pada saat siang hari dengan sendirinya (secara otomatis).
Komponen utama rangkaian lampu otomatis ini adalah LDR yang bekerja sebagai sensor cahaya serta 2 buah transistor NPN sebagai penggerak relay yang nantinya relay ini akan bisa digunakan untuk men-switch lampu utama dari tegangan jala-jala PLN.
Rangkaian ini cukup sederhana dan cocok buat yang baru belajar elektronika, hanya perlu berhati-hati jika nantinya 'ujung panas' relay disambungkan ke jaringan jala-jala PLN untuk men-switch lampu 220 Volt AC. 'Sambungan panas' relay perlu ditilik dengan lebih teliti agar tidak terjadi kebocoran arus dari tegangan tinggi tersebut.
Lebih jelasnya bisa langsung dilihat pada gambar rangkaian di atas. R1 adalah sebuah potensio meter (bisa juga menggunakan VR/ Variable Resistor) yang bisa diputar untuk mengatur kepekaan rangkaian terhadap cahaya. T1 dan T2 bekerja berlawanan, artinya jika T1 on (konduksi) maka T2 akan off dan sebaliknya. Saat siang hari (cahaya terang), LDR menerima cahaya yang akan mengalirkan arus ke basis T1 dan membuat Transistor T1 konduksi. Ini akan membuat basis Transistor T2 ditarik ke rel negatif dan menjadi off, maka relay pun juga off. Pada kondisi gelap resistansi LDR akan berharga tinggi dan arus basis T1 menjadi rendah, maka T1 menjadi off. Kondisi ini mengakibatkan T2 mendapat arus panjar dari R4 yang cukup untuk konduksi, maka T2 on dan relay pun diaktifkan. Sederhana bukan?
Dioda D1 berfungsi untuk mengamankan T2 dari kerusakan akibat tegangan induksi yang dijangkitkan oleh kumparan relay. Untuk catu dayanya bisa menggunakan rangkaian catu daya yang ada di bawahnya itu. Sambungan LDR bisa menggunakan kabel dengan panjang yang cukup jika sensor cahayanya ini ingin diletakkan terpisah dari rangkaian. Atur kepekaannya sesuai yang diinginkan dengan memutar potensio meter R1. Jangan lupa untuk memilih ukuran relay yang sesuai jika ingin digunakan untuk menggerakkan lampu konser 1000 watt, he-he-he!
Lampu Disko Terkontrol Suara

Istilah yang tepat adalah Sound Control Discotic Lamp, yaitu lampu disco yang bekerja berdasarkan 'tingkat kebisingan' lingkungan sekitar. Rangkaian ini pastilah akan menambah semaraknya berdugem-ria dalam ruangan diskotik. Dentuman 'duk' fastbeat song dapat langsung diekspresikan lewat kilatan-kilatan / flashing lampu xenon melalui rangkaian ini. Hmm, tentu saja mungkin tidak cocok dipasang dalam ruang tidur di saat suasana menjelang tidur yang mestinya ditemani alunan musik merdu dari music playermu, kecuali jika sudah siap dimaki tetangga sebelah akibat 'noise' yang 'maksa' masuk ke telinga dia, ha-ha-ha!
Rangkaian lengkapnya langsung saja lihat gambar di atas.
Daftar komponennya berikut ini:
R1 ... 2K2
R2,12 ... 5K6
R3,5 ... 470K
R4,9 ... 33K
R6,7 ... 22K
R8,21 ... 100K
R10,14 ... 10K
R11 ... 68K
R13 ... 4K7
R15,16 ... 1M
R17,18,19,20 ... 47K
R22 ... 470/10 watt
Vr ... 50K
C1,3,5,6 ... 0.1uF/50V
C2,4 ... 150pf
C7 ... 10uF/16V
C8 ... 220uF/16V
C9 ... 0.1uF/250V
C10 ... 47uF/450V
C11 ... 10uF/50V
Tr1,2,3,4 ... FCS9014
SCR ... T-103
D1,2,3,4 ... 1N4007
D5 ... Zener 6V2
T-109 ... Trigger coil
FT-106 ... Xenon Flash Tube / Lampu Tabung Xenon
Condenser Mic 3 kaki
Gimana tuh cara kerjanya? Suara musik ditangkap oleh sensor suara yang berupa mic condenser 3 kaki yang kepekaannya bisa diatur melalui VR. Lalu diperkuat secara bertingkat oleh Transistor Tr1, Tr2, Tr3 dan Tr4 beserta komponen2 pasif di sekitarnya. Selanjutnya output yang diambil dari emitor Tr4 melalui pertemuan resistor R12 dan R13 digunakan untuk mengontrol SCR melalui pintu gate-nya yang akan membangkitkan denyut2 audio. Denyut2 itu kemudian melalui kapasitor C9 dan Coil Trafo T-109 akan men-trigger lampu Xenon Flash Tube (FT-106). Hasilnya? Tentu saja berupa kilatan2 cahaya yang berirama sesuai dengan irama disco yang sedang terdengar. Karena rangkaian tersambung langsung dengan tegangan tinggi dari jala-jala (110 - 220 Volt), maka berhati-hatilah dalam mengkonstruksinya! Nggak lucu kan jika harus merasakan 'cubitan panas' dari tegangan input jala-jala. Buat para maniak fast beat song / musik2 dugem rangkaian ini pastilah akan sangat menyenangkan. Wow... Hey DJ...! Lets Play The Music making some HOT!!! Don't stop 'till down!!! Ha-ha-ha
Jangan Lupakan Pasta Silikon

Ini sedikit tips untuk para elektronika mania dalam merakit sebuah rangkaian elektronik. Komponen elektronika bisa menjadi lebih panjang life-time-nya (awet) jika kita tidak mengabaikan sesuatu yang sering kali dianggap sebagai suatu hal sepele. Jangan abaikan pasta silikon penghantar panas!
Penggunaan pasta penghantar panas atau lebih dikenal sebagai pasta silikon (silicone grease) menjadi sangat penting di saat kita merakit sebuah rangkaian elektronika daya tinggi dimana komponen-komponen aktifnya bekerja mengeluarkan daya disipasi besar seperti misalnya power supply arus besar, power amplifier, booster RF dan sebagainya. Selain memasang sirip pendingin (heat zink) yang sesuai (serta kipas) pada komponen utama semacam transistor dan IC daya, penggunaan pasta silikon akan dapat memperbaiki hantaran panas yang dikeluarkan oleh komponen tersebut. Dengan demikian panas yang dikeluarkan bisa tersalur ke lempeng pendingin (heat zink) dengan lebih sempurna sehingga komponen yang bersangkutan bisa bekerja lebih stabil dan berumur lebih panjang.
Harga pasta silikon di pasaran relatif murah, mungkin cuma dibawah 5 ribu perak sudah bisa digunakan untuk beberapa komponen.  Bentuknya ada yang berwarna putih seperti pasta gigi dan ada juga yang berwarna bening agak kekuningan. Cara pemakaiannya oleskan secukupnya (jangan pelit!) diantara permukaan komponen dan lempeng pendingin sebelum memasang lempeng pendingin. Cukup mudah dan tidak akan menyita waktu banyak, tapi seringkali kita lupa melakukannya. Daripada sering mengganti komponen akibat over heat (panas yang berlebihan), lebih baik menambahkan pasta silikon, benar? Apalagi jika harga komponen tersebut cukup mahal, tentu kita berharap bisa awet dan puas menggunakannya sebelum akhirnya kita memang benar-benar harus menggantinya dengan yang baru lagi karena memang sudah saatnya pensiun!
Bentuknya ada yang berwarna putih seperti pasta gigi dan ada juga yang berwarna bening agak kekuningan. Cara pemakaiannya oleskan secukupnya (jangan pelit!) diantara permukaan komponen dan lempeng pendingin sebelum memasang lempeng pendingin. Cukup mudah dan tidak akan menyita waktu banyak, tapi seringkali kita lupa melakukannya. Daripada sering mengganti komponen akibat over heat (panas yang berlebihan), lebih baik menambahkan pasta silikon, benar? Apalagi jika harga komponen tersebut cukup mahal, tentu kita berharap bisa awet dan puas menggunakannya sebelum akhirnya kita memang benar-benar harus menggantinya dengan yang baru lagi karena memang sudah saatnya pensiun!
Cara Belajar Elektronika
Artikel cara belajar elektronika ini saya kutip dari salah satu sumber ahli elektronik, mari kita simak bersama guna menambah wawasan kita dalam mempelajari elektronika:
Ada baiknya kita coba untuk sedikit berbagi pengalaman tentang belajar elektronika mulai dari dasar. Saya yakin ada banyak para pemula yang masuk ke blog ini. Bagi teman2 yang ingin juga berbagi pengalaman silahkan tulis komentar di bawah, moga aja bisa berguna buat semuanya, ok?
Bagi para pemula jangan berkecil hati, saya yakin kamu pasti bisa memahami bidang elektronik ini, karena saya pun dulu juga sama seperti kamu teman, tidak tau sama sekali dan hanya bengong aja kalo lihat rangkaian elektronika. Yang saya ingat dulu itu ya suka aja lihat komponen yang warna-warni (terutama resistornya). Hijau kuning kelabu, merah muda dan biru, kayak balonku ada lima, hahaha!
Bagaimana cara belajar elektronika yang efektif dan efisien? Cara saya ini mungkin bisa kamu terapkan, meskipun bukan yang terbaik tapi setidaknya bisa menjadi alternatif untuk belajar elektronika mulai dari dasar secara efektif dan efisien.
Tahap awalnya adalah kita harus mengenal dulu berbagai jenis komponen elektronika dan 'sedikit teori' elektronika praktis (lebih banyak tahu teorinya tentu akan lebih bagus lagi). Teori ini diantaranya adalah tentang cara kerja dan fungsi komponen2 tersebut (bisa kamu cari di sini dengan menggunakan kotak pencarian di samping kanan itu) serta penerapannya dalam sebuah rangkaian elektronik.
Berikutnya adalah memperbanyak praktek dengan mencoba merakit rangkaian2 elektronika mulai dari yang paling sederhana hingga yang lebih kompleks lagi (beberapa diantaranya bisa kamu temukan di blog ini). Tanpa praktek pastilah teori akan 'mentah' bukan?
Jika sudah berhasil merakit suatu rangkaian elektronik, yang artinya rangkaian tsb sudah bisa bekerja dengan baik, kita bisa mulai mulai 'memodifikasi' rangkaian itu dengan mengubah beberapa komponennya. Tahap modifikasi rangkaian ini jangan dilakukan secara drastis agar tidak sampai merusakkan komponen2 aktifnya seperti misalnya transistor, IC, dsb. Sebagai contoh misalnya kita membuat sebuah alarm bel yang berbunyi seperti sirine polisi, kita coba ganti beberapa kapasitor atau resistor pada rangkaian tersebut dan kita lihat perubahan suara yang dihasilkannya.
Selanjutnya kita bisa menggabungkan 2 atau lebih rangkaian elektronik menjadi sebuah sistem yang berbeda. Contohnya adalah rangkaian alarm dan lampu otomatis yang terkontrol oleh cahaya, hasilnya adalah sebuah alarm yang akan berbunyi ketika ada cahaya atau sebaliknya berbunyi di saat gelap. Nah sistem yang baru ini bisa kita terapkan misalnya untuk alarm anti pencuri yang akan berbunyi pada saat sinar lampu terhalang oleh bayangan 'tamu tak diundang' itu. Atau bisa juga untuk alarm yang akan membangunkan kita di saat hari mulai terang di pagi hari. Menarik bukan?
Yang paling penting adalah ketekunan dan kreatifitas kita untuk berkreasi dalam elektronika.
Apa aja sih peralatan yang kita butuhkan dalam elektronika? Hm... tergantung ama budget dan doku yang kita punya... Sebagai contoh misalnya solder, dari yang termurah yang harganya mungkin cuma 6 ribu perak hingga puluhan ribu bahkan ratusan ribu juga ada. Lalu AVO Meter, ada yang harganya hingga ratusan ribu rupiah.
Jika kita masuk dalam bidang RF, ada alat yang namanya SWR Meter (Standing Wave Ratio) yang mutlak harus kita miliki untuk melihat besarnya daya dari sebuah pemancar radio dan matching antena. Harganya saat ini pasti pada kisaran di atas ratusan ribu rupiah (bahkan yang bekas sekalipun, kecuali bekas kelindas mobil he-he-he!). Mungkin juga perlu pencacah frekwensi / Frequency Counter dan Osciloskop / Osciloscope untuk menganalisa gelombang. Peralatan2 tsb tentulah harganya mahal untuk ukuran kantong anak SMU dan mahasiswa (kecuali mahasiswa S2 dan S3 :-)).
Untuk tahap pemula mungkin dengan memiliki sebuah solder biasa, AVO Meter analog yang 'murah meriah' serta satu set elektronik tool kit (yang sudah terdapat di dalamnya peralatan seperti obeng set, pinset, tang jumput, obeng trimmer, timah, penyedot timah, dsb.) sudah cukup memadai. Tool kit ini juga ada yang paling murah sampai yang paling mahal dan komplit, silahkan pilih sesuai ukuran kantong kamu :-). Selain itu budget untuk belanja komponen juga pasti diperlukan.
Setelah mahir di praktek dan modifikasi, nantinya bisa berkembang ke arah Electronic Design (merancang rangkaian elektronika). Dalam tahap ini pastilah dibutuhkan lebih banyak pemahaman yang lebih dalam tentang teori elektronika.
Untuk praktek usahakan menggunakan komponen2 elektronik baru yang kita beli dari toko elektronik karena akan terjamin (meski kadang ada juga yang rusak sebelum terpakai). Alternatif lain kalo kita mau men-sortir adalah dengan mencari di loakan/barang bekas, tapi ini tidak disarankan untuk pemula karena kemungkinan besar banyak yang sudah rusak atau 'setengah rusak'. Saya pernah juga sih merakit sebuah rangkaian dari komponen barang bekas seperti card2 komputer lama yang saya dapat dari loakan (hayah...ngirit amit!). Dicopotin satu persatu komponen2nya dengan hati2 lalu saya test untuk memilah komponen2 yang masih bagus. Ribet juga, tapi jauh lebih murah:-). Hasilnya? Bisa berfungsi dengan normal tuh meskipun dirakit dari komponen bekas! Saya yakin teman2 lain yang sudah expert juga banyak yang melakukan seperti ini, misalnya pake lampu tabung second hand dsb.
Tapi sekali lagi ini tidak disarankan untuk pemula...
Semakin banyak praktek akan semakin bagus! Tapi prakteknya harus sampai berhasil, jangan asal solder nggak jadi trus ditinggalin begitu seterusnya..:-P. Menggunakan PCB yang sudah jadi akan lebih bagus daripada PCB dot matrix, tapi untuk prototype dan eksperimen biasanya saya menggunakan PCB dot matrix sebelum nantinya membuat PCB yang sebenarnya (kecuali untuk rangkaian2 RF HF dan VHF). Pokoknya banyakin praktek dan pahami cara kerja rangkaiannya.
Biasanya orang suka malas baca penjelasan cara kerja rangkaiannya, maunya langsung aja dapat skema rangkaiannya dan langsung dipraktekin, nggak mau tau cara kerja rangkaiannya gimana pokoknya jadi dan berfungsi normal langsung loncat ke-(tante)-girang-an! He-he-he! Hayo ngaku aja deh...:-). Padahal dengan memahami cara kerja rangkaian akan mampu memodifikasi dan mengembangkannya lebih lanjut dan bahkan malah bisa menciptakan rangkaian baru yang lebih bagus lagi dari rangkaian tsb. Nah, ini yang seharusnya kita kejar bukan?
Kena solder dan 'kesetrum'? Ah, itu sih udah kenyang kayaknya, he-he-he! Pokoknya ati2 aja kalo kerja teman, apalagi yang langsung pake tegangan dari jala2 listrik, saya pasti tidak berharap ada teman2 yang 'tersengat' arus listrik gara2 praktek elektronika!
Dua lagi tips :
1. Jangan mulai merakit sebuah rangkaian jika komponen yang tersedia belum lengkap. Pasti nantinya akan banyak kendala yang kamu hadapi kalo kamu 'maksa' mengerjakannya.
2. Ingat waktu teman! Jangan karena keasyikan trus lupa makan, lupa tidur dan bahkan lupa ama pacar... Nggak lucu kan kalo harus putus gara2 HOBBY ELEKTRONIKA, he-he-he!
Ada yang mau bertukar pengalaman juga? Silahkan tulis komentar di bawah.
hah.,.,.,.,
BalasHapusWah bagus banget mas infonya. ijin copas ya. oh ya mas.kl bs untuk picturenya, bisa gak waktu kita click, gambarnya muncul versi yang lebih besar? soalnya foto/gambarnya kecil2. trims ya mas.
BalasHapusthank's for your information give the large image and give many kind about a simple robot's
BalasHapus